


























教育机器人的未来
了解这些新技术如何协同工作,以扩大竞争机器人的可能性。
VEX GPS 传感器
在你的机器人上安装游戏定位系统(GPS)
将VEX场地代码应用到场地内部
场地上的X, Y位置和方向
+了解更多
概述
商业全球定位系统(GPS)使用卫星信号和卫星定位来三角测量一个位置,而不是航向。新设计的VEX GPS使用正在申请专利的VEX Field Code对位置和航向进行三角测量。
VEX GPS传感器是如何工作的
字段代码安装在VEX字段的内部圆周上。字段代码中的棋盘模式用于标识该模式中每个单独块的位置。像卫星一样,它创造了数百个已知位置。为了感知Field Code, VEX GPS传感器,一个黑白摄像头,安装在机器人的后部,面朝后。摄像机只需要看到大约17英寸的代码条来三角测量位置和方向。VEX GPS是一个绝对定位系统,因此它不会漂移,也不需要按场进行校准。
如何应用
了解机器人的位置对于路径规划算法至关重要,从而实现从一个点到另一个点的自主运动。
VEX GPS 传感器
在你的机器人上安装游戏定位系统(GPS)
将VEX场地代码应用到场地内部
场地上的X, Y位置和方向
+了解更多
概述
商业全球定位系统(GPS)使用卫星信号和卫星定位来三角测量一个位置,而不是航向。新设计的VEX GPS使用正在申请专利的VEX Field Code对位置和航向进行三角测量。
VEX GPS传感器是如何工作的
字段代码安装在VEX字段的内部圆周上。字段代码中的棋盘模式用于标识该模式中每个单独块的位置。像卫星一样,它创造了数百个已知位置。为了感知Field Code, VEX GPS传感器,一个黑白摄像头,安装在机器人的后部,面朝后。摄像机只需要看到大约17英寸的代码条来三角测量位置和方向。VEX GPS是一个绝对定位系统,因此它不会漂移,也不需要按场进行校准。
如何应用
了解机器人的位置对于路径规划算法至关重要,从而实现从一个点到另一个点的自主运动。
VEX AI 视觉系统
探索人工智能
同时检测数百个物体
确定对象类型、位置和距离
体验增强现实的实时视图
+了解更多
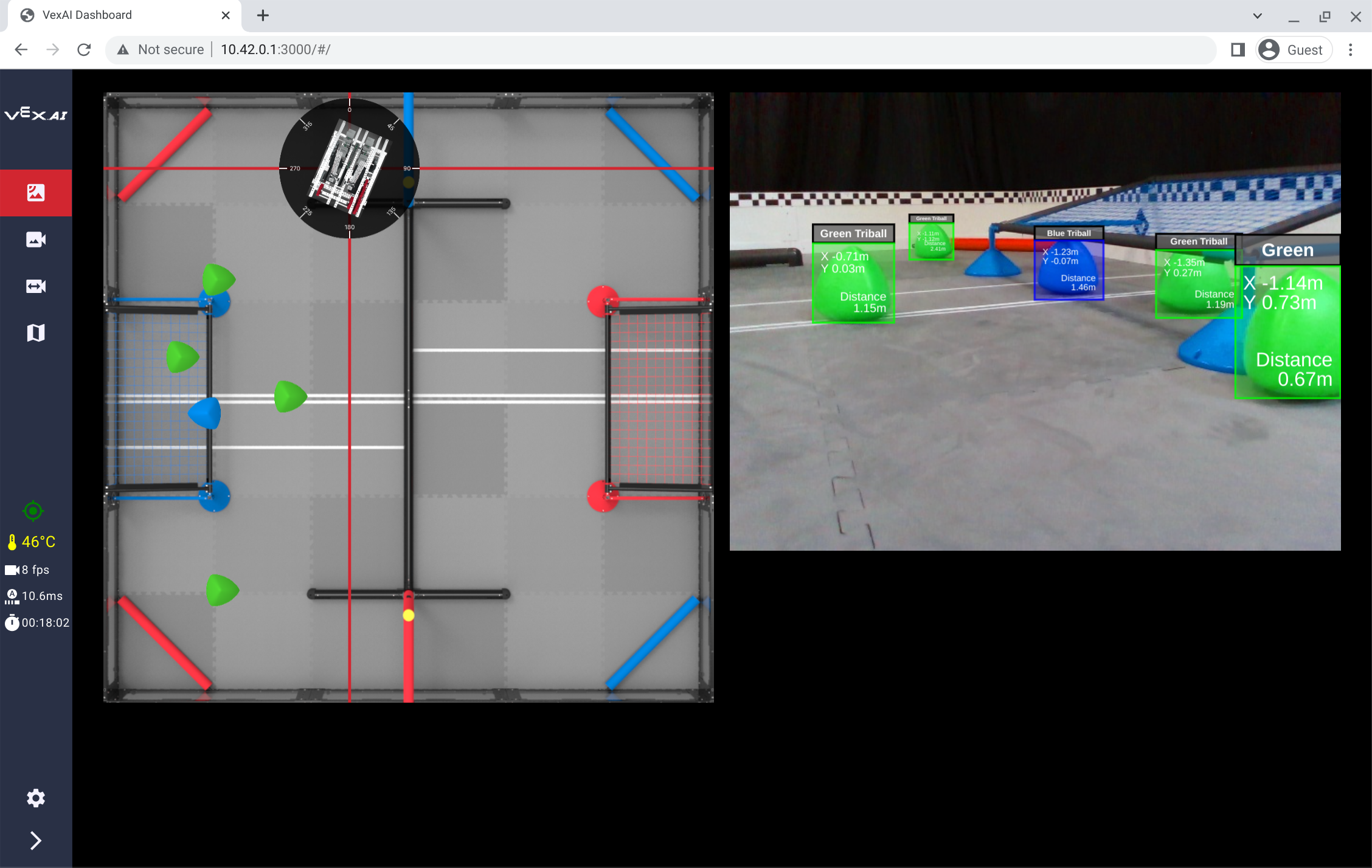
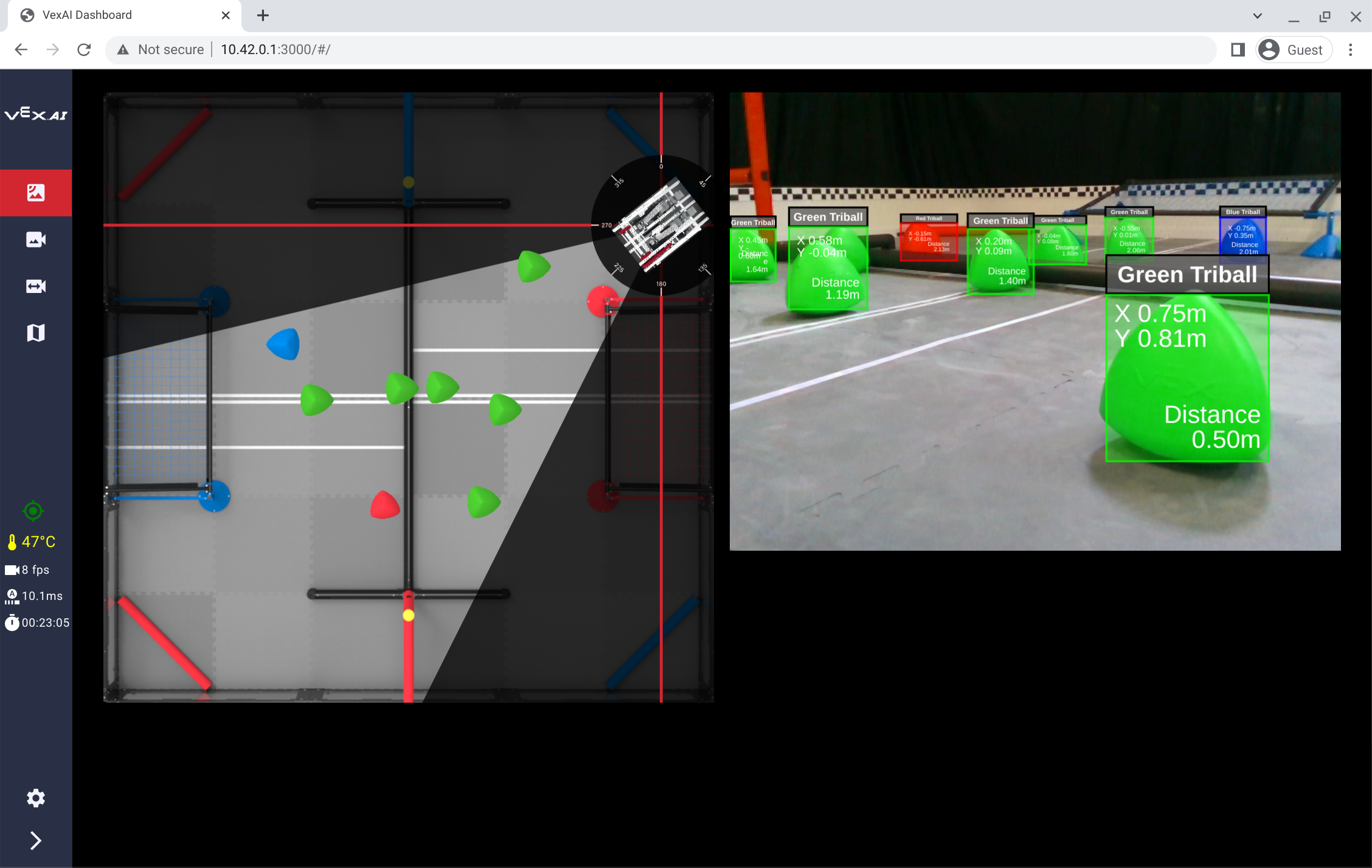
概述
人工智能最常见的用途是物体识别。人类认为物体识别是理所当然的,但机器人需要一些帮助。大多数机器人比赛使用人类驾驶员的主要原因是机器人对其周围环境缺乏了解。 VEX AI 使用软件和神经网络来检测 VEX 机器人想要与之交互的游戏片段、目标和物体。
VEX AI 视觉系统的工作原理
许多对象分类系统旨在以一定的确定性确定图像的一个主题,例如确定性为 96% 的猫。 VEX AI 系统旨在识别图像中各种对象的数百个实例并定位它们的屏幕坐标。此外,VEX AI 系统使用立体视觉测量到每个物体的距离。该信息与来自 VEX GPS 的位置信息相结合,以在 3D 空间中定位每个物体。
如何应用
编写代码来对数据进行排序并做出明智的战略决策是计算机科学和竞争性自主机器人技术的关键部分。
VEX AI 视觉系统
探索人工智能
同时检测数百个物体
确定对象类型、位置和距离
体验增强现实的实时视图
+了解更多
概述
人工智能最常见的用途是物体识别。人类认为物体识别是理所当然的,但机器人需要一些帮助。大多数机器人比赛使用人类驾驶员的主要原因是机器人对其周围环境缺乏了解。 VEX AI 使用软件和神经网络来检测 VEX 机器人想要与之交互的游戏片段、目标和物体。
VEX AI 视觉系统的工作原理
许多对象分类系统旨在以一定的确定性确定图像的一个主题,例如确定性为 96% 的猫。 VEX AI 系统旨在识别图像中各种对象的数百个实例并定位它们的屏幕坐标。此外,VEX AI 系统使用立体视觉测量到每个物体的距离。该信息与来自 VEX GPS 的位置信息相结合,以在 3D 空间中定位每个物体。
如何应用
编写代码来对数据进行排序并做出明智的战略决策是计算机科学和竞争性自主机器人技术的关键部分。
传感器融合图
在地图上定位机器人、物体和目标
机器人之间共享信息
通过 WiFi 实时观看这一切
+了解更多
概述
传感器融合涉及从多个来源收集数据并将其组合起来,以更好地了解周围环境。
传感器融合地图是如何工作的
传感器融合用于绘制场地和场地上物体的地图。这结合了机器人的位置和它所看到的物体的相对位置,从而可以准确地定位场地上的每个物体。机器人视野之外的物体会被存储并标记时间戳,因为随着时间的推移,该特定物体有可能不再位于上次看到的位置。
如何应用
传感器融合提供的知识是确定和执行自主机器人操作的关键的第一步。这些广泛的信息对于试图扩展机器人功能的编码人员来说也至关重要。所有这些数据都通过 WiFi 发送到您设备的浏览器,以便您可以远程观看。 WiFI 数据可以包括带有信息叠加的 AI 视频源、传感器融合地图以及 V5 大脑可用的任何其他信息。
传感器融合图
在地图上定位机器人、物体和目标
机器人之间共享信息
通过 WiFi 实时观看这一切
+了解更多
概述
传感器融合涉及从多个来源收集数据并将其组合起来,以更好地了解周围环境。
传感器融合地图是如何工作的
传感器融合用于绘制场地和场地上物体的地图。这结合了机器人的位置和它所看到的物体的相对位置,从而可以准确地定位场地上的每个物体。机器人视野之外的物体会被存储并标记时间戳,因为随着时间的推移,该特定物体有可能不再位于上次看到的位置。
如何应用
传感器融合提供的知识是确定和执行自主机器人操作的关键的第一步。这些广泛的信息对于试图扩展机器人功能的编码人员来说也至关重要。所有这些数据都通过 WiFi 发送到您设备的浏览器,以便您可以远程观看。 WiFI 数据可以包括带有信息叠加的 AI 视频源、传感器融合地图以及 V5 大脑可用的任何其他信息。
VEX AI 竞赛
由REC基金会提供
4台机器人,2分钟全自动
概述
VEX AI、VEX GPS 和 VEX LINK 以及由此产生的传感器融合为学生提供了提升自主机器人水平的机会! VEX 人工智能竞赛突破了机器人竞赛的界限。该游戏与 VRC 和 VEX U 竞赛分开。
传感器融合地图是如何工作的
每个团队都会携带两个他们设计和建造的机器人作为一个团队进行工作。团队可以 3D 打印和加工零件。团队可以使用定制电子设备,并且没有电机数量限制。该游戏将向高中生和大学生开放。
提升你的技能

机械工程
设计并编程两个需要协同工作才能完成 VEX 挑战的机器人
+了解更多
团队可以建造两个机器人,作为一个团队一起工作。这显着改变了机器人设计和机器人策略动态。您会建造两个相同的机器人,还是建造两个具有不同技能和能力的不同机器人?现在,随着 3D 打印和加工的发展,也有新的技能需要学习和利用。
电气工程
实现定制的机器人传感器和电路
+了解更多
需要一个VEX没有的新传感器。你有选择!购买一个并集成它,或者更好的是,构建它。学生可以设计自己的电路来增强机器人的能力。有新的技能需要学习,包括原理图、电路设计、微控制器和新的传感器技术。可能性是真实的,学习潜力也是真实的!

计算机科学
将您的驾驶技能,进攻和防守以及游戏策略转换为代码。
+了解更多
想象一下你的编程技能接下来会发生什么!您必须在代码中复制您的驱动程序技能。这意味着路径规划、对象操作和评分。您必须在代码中编写进攻和防御策略。这意味着你需要计算分数,确定下一个最佳动作,协调两个机器人,并快速执行计划。最后,可能也是最大的挑战是,你必须预测并应对对手的策略和不断变化的场地条件……所有的代码。